Dynamická plantografie (dynamická podografie) je vyšetřovací metoda, u které je pomocí tlakové plošiny (resp. koberce či vložky do bot) měřeno rozložení tlaku pod ploskou, obvykle při chůzi či různých modifikacích stoje. Měření probíhá v určitém čase, přičemž dochází ke změnám hodnot sledovaných parametrů, proto dynamická plantografie. I klidný vzpřímený stoj je pouze „kvazistatická“, nikoliv čistě statická poloha.
Dynamická plantografie (dynamická podografie) je vyšetřovací metoda, u které je pomocí tlakové plošiny (resp. koberce či vložky do bot) měřeno rozložení tlaku pod ploskou, obvykle při chůzi či různých modifikacích stoje. Měření probíhá v určitém čase, přičemž dochází ke změnám hodnot sledovaných parametrů, proto dynamická plantografie. I klidný vzpřímený stoj je pouze „kvazistatická“, nikoliv čistě statická poloha.
Dynamická plantografie je využívána především v rámci základního výzkumu „normální“ chůze“ či vzpřímeného stoje, jejich modifikací a patologií. Postupně se uplatňuje i v klinických aplikacích např. v ortopedii, neurologii, rehabilitaci či protetice a ortotice, případně sportovní medicíně či tréninku. Jiným příkladem využití je např. hodnocení trajektorie COP při sedu v sedle koně během hippoterapie či tréninku.
V České republice jsou v současné době využívány komerčně dodávané systémy: emed® (fa Novel GmBH, Munich, www.novel.de), footscan® (fa RSScan International, www.rsscan.com) a Baropodometer (fa Diagnostic Support). Tlakové vložky do bot pedar jsou modifikací systému emed®.
Významnou součástí těchto systémů je sofistikovaný software umožňující vyhodnotit velké množství snímaných dat.
1. Technické parametry
1.1 Konstrukce plošiny a její rozměry
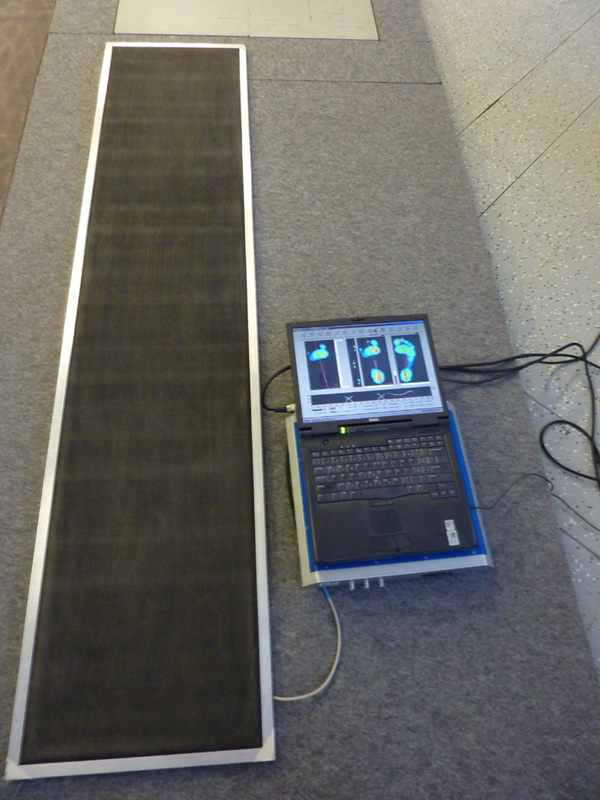
K měření jsou používány tlakové plošiny s vysokou hustotou tlakových senzorů.
Měřící plošina je tvořena několika vrstvami. Nejnižší je spodní ochranná vrstva např. z gumotextilu. Nad ní leží vrstva obsahující senzory. Zcela nahoře leží horní ochranná vrstva, která musí být dostatečně pevná k ochraně senzorů a zároveň elastická k přenosu tlaku.
Plošiny Footscan jsou dlouhé 0,5 m, 1m nebo 2 m při šířce přibližně 0,4 m.
Plošiny Emed jsou dlouhé 0,61 m (emed–at a emed-m) nebo 0.69 m (emed-x) při šířce 0,32, resp. 0,4 m.
Vlastní aktivní plocha se senzory je však vždy o něco menší než plocha celková. To je třeba vzít do úvahy při výpočtu hustoty senzorů (viz 1.2.3).
Nejzranitelnějším místem celého zařízení je spoj mezi měřící plošinou a kabelem. Proto je vhodné zajistit plošinu a kabel proti nadměrným vzájemným posunům v oblasti spoje, například fixací kabelu k plošině a podlaze lepící páskou.
1.2 Senzory
Tlakových senzorů existuje řada typů. V plantografických plošinách jsou nejčastěji používány kapacitní a odporové senzory.
1.2.1 Kapacitní senzory
Kapacitní senzory mají různé modifikace. V plantografii jsou používány kapacitní senzory tvořené dvěmi plochými vodiči, mezi kterými je vloženo elastické dielektrikum. Při zatížení je elastické dielektrikum stlačeno, čímž dochází ke změně jeho permitivity a také vzdálenosti obou vodičů. Tím se změní kapacita senzoru a dochází ke změně napětí.
Snímkovací frekvence je maximálně 100 Hz, omezení je dáno hysterezí v důsledku zpomalené reakce materiálu dielektrika na změnu tlaku. Tato frekvence je dostačující pro vyšetření chůze, není již ale vhodná pro vyšetření sprintu či skoku. Předností těchto senzorů je vysoká přesnost a opakovatelnost měření.
Kapacitní senzory používá např. systém Emed.
1.2.2 Odporové senzory
Odporové senzory jsou tvořeny dvěmi plochými kruhovými vodiči, mezi kterými je vrstva vodivého uhlíkového prachu nebo inkoustu. Při zatížení dochází k propojení obou vodičů, přičemž odpor klesá v závislosti na zvyšování tlaku.
Tyto senzory jsou velmi tenké, ale po opakovaném použití klesá jejich citlivost, což omezuje spolehlivost měření.
Odporové senzory s plochu 5 x 7 mm jsou používány např. u systému Footscan.
U systému typu footscan® Hybrid plate jsou kombinovány odporové a piezoelektické senzory.
1.2.3 Hustota senzorů a jejich citlivost
Systém emed®-x dosahuje hustotu senzorů až 4/cm2 při rozsahu citlivosti 10-1270 kPa (10 kPa≈ 1 N/cm2).
Plošiny footscan® 7.x mají hustotu senzorů přibližně 2,6/cm2 při citlivosti v rozsahu 0,27-127 N/cm2. Citlivost závisí na použitém software, u nižších verzí je nižší, např. u footscan® Pro byla 0,7-155 N/cm2.
1.3 Snímkovací frekvence
Systém emed®-x má snímkovací frekvenci 100 nebo 400 Hz.
U systému footscan® 7.x jsou data snímána s frekvencí až 500 Hz. S touto frekvencí je ale možné měřit pouze 2 vteřiny. Proto může být výhodnější použití např. frekvence 100 Hz, která umožňuje měření trvající až 10 vteřin. Tyto hodnoty se týkají měření na základní půlmetrové plošině. Při měření na delších plošinách a tedy větší ploše platí nižší hodnoty, např. pro dvoumetrovou plošinu 2 vteřiny při 125 Hz, resp. 2,5 vteřiny při 100 Hz.
Při synchronizaci s jiným měřícím zařízením je nutné nastavit shodnou snímací frekvenci obou přístrojů. Snímací frekvence je také závislá na připojeném počítači/notebooku.
1.4 Zahájení měření
Měření může být spuštěno různými způsoby: dosažením předem zvoleného tlaku na tlakové plošiny, kliknutím na příslušné tlačítko na obrazovce, signálem ze synchronizovaného měřícího zařízení.
1.5 Kalibrace
Důležitým opatřením je opakovaná kalibrace zařízení zhruba vždy po 2 týdnech. U systému Emed i Footscan je kalibrován každý senzor jednotlivě.
2. Zpracování dat
Zpracování velkého množství dat umožňuje připojený počítač s příslušným softwarem. Výsledkem jsou tabulky a grafy zachycující jak rozložení tlaku pod ploskou tak i řadu dalších z něj odvozených parametrů, např. COP (Centre of Pressure), a jejich změny při stoji a jeho modifikacích či během oporové fáze krokového cyklu (GC). Tyto výsledky lze hodnotit jak samostatně tak i v kombinaci s výsledky jiných sofistikovaných metod, např. 3D kinematické analýzy.
Naměřená data jsou zároveň ukládána do databáze, která umožňuje jejich pozdější opětovné hodnocení a srovnání s jinými měřeními jejich kopírování či export do jiných formátů (např. xls).
3 Zobrazení výsledků
Výsledky jsou zobrazovány jako 2D zobrazení rozložení tlaku a dalších parametrů, číselné hodnoty jednotlivých parametrů včetně tabulek, spojnicové grafy, případně i 3D dynamické grafy. V podrobnostech se systémy mohou lišit.
3.1 2D dynamický graf rozložení tlaku a dalších parametrů
U systému Emed velikost maximálního tlaku barevně odstupňována a číselně vyjádřena v síti obdélníkových polí tvořících „otisk“ plosky.
U systému Fooscan je standardní dynamické zobrazení „otisku“ s měnící se konturou „otisku“ plosky, velikost tlaku je barevně zobrazena s neostrými přechody mezi sousedícími senzory.
3.1.1 Rozdělení „otisku“ do zón
Sytém Footscan mimo jiné automaticky rozděluje „otisk“ nohy do 10 anatomických zón: HM (mediální část paty). HL (laterální část paty), MF (středonoží), M1-M5 (I. až V. metatarz), T1 (palec), T2-T5 (II. až V. prst). Toto rozdělení, které lze ručně upravit, je podkladem pro další výpočty.
3.2 Číselné hodnoty parametrů a jejich tabulky
Číselné hodnoty vybraných parametrů ve vybrané oblasti jsou zobrazovány v okéncích jako hodnoty měnící se dle času, resp. % trvání fáze opory nebo v tabulkách.
3.3 Čárové grafy
Spojnicové grafy zobrazují hodnoty tlaku a dalších parametrů v dané oblasti v závislosti na čase.
3.4 3D graf
Systém Footscan nabízí 3D dynamický graf zobrazující průběh změn tlaku nad jednotlivými senzory během oporné fáze. Graf má podobu sítě obdélníkových políček, jejichž vertikální poloha a barva se mění s velikostí zatížení.
4 Parametry
Základním parametrem je tlak a jeho distribuce v ploše a jeho změny v čase. V ostatních parametrech se mohou jednotlivé systémy lišit.
4.1 Tlak
Tlak [N/cm2; kPa], jeho distribuce v měřené oblasti a jeho změny v čase [s; % trvání oporné fáze] jsou základními parametry dynamické plantografie. Z těchto přímo měřených parametrů je vypočítávána řada dalších.
4.2 Celková síla
Celková vertikální síla [N] je vypočtena z tlaků všech zatížených senzorů v oblasti dané plosky. V grafickém zobrazení má její křivka typický dvouvrcholový průběh.
4.3 COP
Společně s celkovou silou je vypočten jeden z nejčastěji sledovaných parametrů COP (Centre of pressure) a jeho trajektorie [X,Y]. COP je působiště vektoru reakční síly a obvykle je stanovováno pomocí silových plošin (např. typ Kistler nebo AMTI), kdy je vypočteno z hodnot 3 silových senzorů. Při použití tlakových plošin je COP vypočteno z aktuální distribuce tlaku v dané ploše. Výsledky těchto dvou metod se mohou lišit, např. vzhledem k prahu citlivosti tlakových senzorů atd.
Polohu a trajektorii COP lze sledovat jak při chůzi, tak při (kvazi)statických činnostech (viz 6).
Častou chybou je zaměňování COP s COG (Centre of gravity), což je průmět těžiště do podložky, či dokonce přímo s těžištěm (COM, Centre of mass). Polohu těžistě ani jeho průmět do podložky nelze z měření na tlakových či silovách plošinách přímo určit.
4.4 Heel strike %
Časové období [s; % trvání oporné fáze], kdy zatížení spočívá pouze na patě. Pozor na záměnu s Heel Strike jako okamžikem dopadu paty na začátku oporné fáze krokového cyklu. Region paty je stanoven automaticky a může být manuálně upraven.
4.5 Mid stance %
Doba trvání [s; % trvání oporné fáze] od prvního zatížení některé hlavičky metatarzů do plného odlepení paty.
4.6 Foot flat %
Doba trvání [s; % trvání oporné fáze] od začátku zatížení všech hlaviček metatarzů do úplného odlepení paty.
4.7 Mids-Footf %
Rozdíl v trvání Mid stance % a Foot flat %.
4.8 Propulsion %
Trvání období [s; % trvání oporné fáze] kdy zatížení spočívá pouze na předonoží, začíná odlepením paty.
4.9 Start time
Začátek zatížení určité oblasti plosky [s; % trvání oporné fáze].
4.10 End time
Konec zatížení určité oblasti plosky [s; % trvání oporné fáze].
4.11 % Contact
Celková doba zatížení určité oblasti vzhledem k trvání fáze opory [%].
4.12 Max F
Maximální zatížení [N; kp] naměřené v určité oblasti.
4.13 Time Max F
Okamžik [s; % trvání oporné fáze] dosažení maximálního zatížení v určité oblasti.
4.14 Load rate
Rychlost změny zatížení [N/cm2.ms], jejíž hodnota je vypočtena v určitém okamžiku jako ΔP/Δt. Období, ze kterého je hodnota vypočítávána lze manuálně nastavit jako počet snímků před a po daném okamžiku (snímku) v hodnotě 1 až 10. Při nastavení hodnoty 1 se jedná o 3 snímky, při nastavení hodnoty 10 je do výpočtu vzato 21 snímků. Konkrétní čas je dán snímkovací frekvencí (viz 1.3) Nejde tedy o rychlost dosažení maximálního času, jak bývá někdy mylně uváděno.
4.15 Impuls
Celkové zatížení určité oblasti [F.s] Stejně jako silový impuls je integrál síly na čase, tak tlakový impuls je integrál tlaku na čase. Integrál lze vyjádřit jako plocha pod křivkou závislosti tlaku na čase. Vzhledem k tomu, že čím bude větší síla (tlak) a čím déle bude trvat, tak bude impuls větší, tedy se jedná o celkové zatížení.
4.16 Contact area
Plocha [cm2] určité oblasti.
4.17 Active contact area
Plocha [cm2], ve které byly aktivovány senzory v rámci určité oblasti.
4.18 Max peak sensor
Maximální tlak [N/cm2; kPa] na jednom senzoru naměřený v určité oblasti.
4.19 Rozměry a délky
Šířka chodidla je určena jako dva nejvzdálenější body předonoží a délka chodidla jako nejvzdálenější body paty a prstů [cm; mm] jsou stanoveny automaticky a lze je manuálně upravit.
Délka kroku a dvojkroku [m].
Plocha [cm2] plosky (resp plochy se senzory aktivovanými během fáze opory) a jejích částí – zánoží, středonoží a předonoží.
4.20 Osa chodidla
U systému Footscan je osa chodidla stanovena automaticky jako přímka procházející „středem paty“ a mezi II. a III. metatarzem. Není přesněji popsáno jak je stanoven „střed paty. Lze se jen domnvíat, že jde o bod prvního dotyku na patě, případně nejdorzálnější bot paty (viz 6.19). Polohu osy je možné manuálně upravit. Osa stanovená automaticky není shodná s anatomickou osou, která je shodná s osou II. metatarzu.
4.21 Úhel chůze
Úhel [º] mezi osou nohy a osou chůze, za kterou je považována osa plošiny.
4.22 Osa subtalárního kloubu
Osa subtalárního kloubu je stanovena automaticky (z průběhu zatížení zánoží? ) stejně jako úhel, který svírá s osou chůze, resp. dlouhou osou plošiny (osa x). Větší hodnota úhlu znamená výraznější pronaci.
4.23 Další úhly
Další úhly, např. úhel hallux valgus, lze změřit manuálním nastavením dvojic přímek.
4.24 Symetrie chůze
U dvoumetrových plošin lze porovnat parametry dvojkroku, měření je ale ovlivněno snahou probanda „vejít se“ na plošinu
4.25 Foot Arch
Stanovení typu nohy dle prof. Cavanagha. Úsečka spojující nejvzdálenější body otisku plosky bez prstů je kolmicemi rozdělena na třetiny. Tím jsou vymezeny 3 oblasti: A (zánoží), B (středonoží) a C (předonoží a je vypočtena jejich plocha. Tzv. arch index (AI) je vypočten dle vzorce
AI (%) = B/(A+B+C)
Dle hodnoty AI e stanoven typ nohy: vysoká noha (AI 28).
5 Ortézování dle dynamického plantogramu
Systém Fooscan umožňuje sledovat průběh pronace a supinace v oblasti zánoží, středonoží a předonoží na základě změny rozdílů v zatížení mediální a laterální oblasti zánoží či středonoží nebo mediálních a tří laterální metatarzů (viz 3.1.1). Aplikace D3D také automaticky navrhuje typ ortézování. Do určité míry jde o sofistikovanou obdobu Rootovy klinické diagnostiky typů nohy a odpovídajícího funkčního ortézování. Následující text se týká verze footscan® 7.x
5.1 Hyperpronace předonoží
Hyperpronace předonoží je stanovena na základě porovnání zatížení pod hlavičkami metatarzů během období 50-80 % fáze opory dle vzorce:
k = (M1 + M2) / (M1 + M2 + M3 + M4 + M5)
Při dosažení či překročení kritické hodnoty (k ≥ 63 pro chůzi anebo k ≥ 65 pro běh) jde o hyperpronaci, u které je vhodné použít antipronační vložku pod předonoží.
5.2 Hypersupinace předonoží
Hypersupinace předonoží je stanovena na základě porovnání zatížení pod hlavičkami metatarzů během období 50-80 % fáze opory dle vzorce:
k = (M3 + M4 + M5) / (M1 + M2 + M3 + M4 + M5)
Při poklesu pod kritickou hodnotu (k < 65 pro chůzi anebo k < 60 pro běh) jde o hypersupinaci, u které je vhodné použít laterální stabilizační vložku pod předonoží
5.3 Hyperpronace středonoží
Hyperpronace středonoží je stanovena na základě porovnání zatížení pod středonožím během období 25-40 % fáze opory dle vzorce:
k = (M1 + M2 + HM) / (M1 + M2 + M3 + M4 + M5 + HM + HL)
Při dosažení či překročení kritické hodnoty (k ≥ 60 pro chůzi anebo k ≥ 65 pro běh) jde o hyperpronaci, u které je vhodné použít antipronační vložku pod středonoží.
5.4 Hyperpronace zánoží
Hyperpronace zánoží je stanovena na základě porovnání zatížení pod patou během období 0-15 % fáze opory dle vzorce:
k = (HM) / (HM + HL)
Při dosažení či překročení kritické hodnoty (k ≥ 63 pro chůzi anebo k ≥ 68 pro běh) jde o hyperpronaci, u které je vhodné použít 2º antipronační vložku pod patu. Při dosažená 120 % kritické hodnoty (k ≥ 75,6 pro chůzi anebo k ≥ 81,2 pro běh) je vhodné použít použít 4º antipronační vložku.
5.5 Hypersupinace zánoží
Hypersupinace zánoží je stanovena na základě porovnání zatížení pod patou během období 0-15 % fáze opory dle vzorce:
k = (HM) / (HM + HL)
Kritická hodnota k pro chůzi je 63 a pro běh 68. Při poklesu pod 58 % kritické hodnoty (k < 36,54 pro chůzi anebo k < 39,44 pro běh) jde o hypersupinaci, u které je vhodné použít 2º antisupinační vložku pod patu. Při poklesu pod 48 % kritické hodnoty (k < 30,24 pro chůzi anebo k < 32,64 pro běh) je vhodné použít 4º antisupinační vložku.
6 Stabilometrie
Systém Footscan nabízí modul , který umožňuje vyhodnotit změny polohy COP (viz 4.3) při (kvazi)statickém vzpřímeném stoji a dalších činnostech, u kterých nedochází ke změně postavení nohou na měřící plošině, nebo jsou tyto změny minimální (např. golfový úder, Trendelenburgův stoj atd.)
7 Použitá literatura
Software Manual Footscan® 6.3.2 [Manuál].RSscan International
Footscan® 7.x gait interfac [Manuál].RSscan International
http://www.novel.de/productinfo/systems-emed.htm
http://www.rsscan.com/
Technical description of Footscan® systems [Manuál]. RSscan International. |