S rozvojem záznamových médií (fotografie, film), které umožnily trvalé uchování záznamu pohybu, byly vytvořeny základní podmínky pro možnost následné biomechanické analýzy. Došlo k postupnému rozvoji metody, která je založena na získání souřadnic bodů umístěných na těle sledovaného subjektu (objektu) – kinematografické vyšetřovací metody (videografické vyšetřovací metody; videography). Podobně jako v jiných oborech lidské činnosti umožnil nástup výpočetní techniky do této oblasti výrazné zkvalitnění a akceleraci, které se projevily v tom, že se výše uvedené metody zařadily mezi nejrozšířenější postupy při analýze pohybu v biomechanice. To umožnilo rozšíření odvětví, ve kterých lze tuto metodu využívat – ortopedie, fyzioterapie, protetika, vrcholový sport, ergonomie apod.
Z historického hlediska se jedná o relativně krátké období, kde za výchozí bod můžeme považovat např. rok 1816, kdy J. N. Niépce vytvořil první ,,snímek“ procesem, který nazval heliografií. V roce 1829 spolu s L. J. M. Daguerrem zahájil spolupráci na vývoji fotografie. Postup nazývaný „daguerotypie“ byl 19. 8. 1839 oficiálně uznán na zasedání Francouzské akademie věd v Paříži. O 33 let později začal E. Muybridge „skládáním“ fotografii vytvářet kinogramy pro vyjádření pohybu zvířat. První 3D analýza pohybu segmentů při chůzi vznikla již v roce 1890. V roce 1895 předvedli bratři Lumiérovi zařízení zvané kinematograf. Tím byla zahájen proces, jehož součástí bylo v roce 1980 také představení systému VICON.
Při kinematické analýze je pohyb posuzován bez ohledu na příčiny (síly), které jej způsobují. Základní posloupnost fyzikálních veličin vychází z určení závislosti dráhy na čase, ze které jsou dále odvozeny závislosti pro rychlost a zrychlení. Vzhledem k charakteru pohybu segmentů lidského těla je často využívána také analogická triáda pro úhlové veličiny, kdy ze závislosti úhlu na čase je odvozena úhlová rychlost a následně úhlové zrychlení. Z matematického hlediska se jedná o využití opakovaného derivování.
Tato metoda je založena na vyhodnocení záznamu pohybu pomocí určení souřadnic vybraných bodů na sledovaném objektu (na lidském těle). Mezi základní výhody, které jsou charakteristické pro využití videozáznamu při analýze pohybu, patří:
Využití analytické geometrie pro stanovení základních parametrů
Základní části postupu při použití kinematografické (videografické) metody jsou znázorněny na obr. 1.
Obr. 1 Základní kroky při analýze pohybu použitím 3D videografické metody
Při přechodu od rovinného k prostorovému znázornění musíme provést rozšíření rovinné soustavy souřadnic. To znamená, že k původní dvojici os x, y přiřadíme třetí osu z. Libovolný bod je v tomto případě znázorněn pomocí tří souřadnic, které jednoznačně určují jeho polohu – při volném pohybu v prostoru má bod tři stupně volnosti.
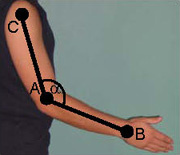
Nechť jsou dány body A, B, C o souřadnicích A = [xA; yA; zA], B = [xB; yB; zB], C = [xC; yC; zC]. Pro velikost úsečky AB (vzdálenost bodů A, B; délku segmentu, ohraničeného body A, B) platí: 
Velikost úhlu a mezi segmenty určíme ze vztahu:
Záznam pohybu
Při záznamu pohybu dochází k zobrazení prostoru (3D) na rovinné dvourozměrné (2D) zobrazení. Pouze v situaci, kdy jsou objekty umístěny do roviny, která je kolmá na optickou osu kamery, odpovídají jejich rozměry ve středu sledovaného úseku reálným velikostem.
Umístění kamer při 2D analýze
Pro zobrazení reálné velikosti by měla optická osa kamery protínat sledovaný úsek v jeho středu. Další podmínkou je umístění kamery tak, aby její optická osa byla kolmá k rovině analyzovaného pohybu. Vychýlení kamery od tohoto směru, podobně jako posun kamery od středu sledovaného úseku má za následek vznik nepřesností ve velikosti vyhodnocených parametrů.
Umístění kamer při 3D analýze
Pro možnost získání prostorových souřadnic bodu je nutnou podmínkou jeho viditelnost na záznamu minimálně ze dvou kamer. Tomu také musí odpovídat rozmístění kamer. Pro většinu pohybů je prakticky nemožné splnit výše uvedenou podmínku současně pro větší počet bodů na sledovaném objektu. Proto je nutné zvýšit počet kamer, které jsou použity pro záznam pohybu. Při možnosti volby je vhodné použít takové rozmístění kamer, kdy se úhel mezi jejich optickými osami blíží 90°.
Pohyblivé kamery
Při analýze pohybu s velkými prostorovými nároky jsou používány pohyblivé kamery, které umožňují „sledovat“ snímaný objekt v průběhu pohybu. Pohyb kamer je posuzován pomocí jejich rotace v rovině horizontální (panning) a vertikální (tilting).
Ve všech výše uvedených případech je pro adekvátní použití kamer nutné dodržet základní pravidla, která jsou platná i pro záznam pohybu pro běžné účely. Sem můžeme zařadit např.:
a) vzdálenost kamery od roviny sledovaného pohybu,
b) vliv vnějších faktorů (další osoby, fixní objekty),
c) světelné podmínky,
d) vhodné pozadí za objektem, bez rušivých vlivů,
e) vlivy počasí apod.
Značky pro identifikaci vybraných bodů
Pro správné vyhodnocení záznamu je nutné vytvoření odpovídajících podmínek ještě před zahájením vlastního natáčení. Jedním z běžně používaných postupů je označení vybraných bodů na sledovaném objektu. Zatímco pro laboratorní měření je tento postup typický, v některých případech (analýza pohybu v rámci soutěží) jej nelze použít, protože by došlo k ovlivnění sledované činnosti.
Používané značky lze rozdělit do tří skupin:
-
Pasivní – vytvořené z tradičních materiálů. Jejich označení na záznamu pohybu probíhá manuálně s využitím kurzoru. Hlavním požadavkem je dostatečný kontrast s podložkou a nízká hmotnost
-
Semiaktivní – jedná se o pasivní značky, které jsou překryty reflexním materiálem. V tomto případě značky odrážejí elektromagnetické vlnění (nejčastěji v oblasti infračerveného spektra), které dopadá ze zdrojů umístěných v okolí objektivu kamery.
-
Aktivní – zpravidla infračervené diody, které emitují elektromagnetické vlnění s vlnovou délkou okolo 800 nm. V tomto případě je signál z těchto značek zpracován v generátoru souřadnic a pixely příslušných jasů jsou grupovány dohromady.
Umístění značek na lidské tělo
Pro označení bodů na lidském těle, které slouží pro určení vybraných segmentů, je v první fázi nezbytná palpace odpovídajících kostěných struktur. Jejich projekcí na povrch těla získáme místo pro připevnění značky. Základním problémem, který vzniká v průběhu pohybu, je posun těchto značek způsobený posunem měkkých tkání, nacházejících se mezi kostí a značkou. Velikost těchto změn je nutné posuzovat individuálně, protože tloušťka vrstvy i rozložení tkáně se mohou výrazně lišit.
Soubory značek používané pro označení segmentů při analýze chůze
Pro možnost porovnání výsledků, získaných na různých pracovištích, je nutné používat stejné (nebo mírně modifikované) soubory značek pro vybrané pohybové činnosti. Nejinak je tomu i v případě analýzy chůze, kdy mezi nejčastěji používané soubory značek pro označení dolních končetin lze zařadit „Kit Vaughan“ a „Helen Hayes Hospital“ soubory.
Z hlediska základních anatomických rovin je nejobtížnější určení velikosti rotace v rovině transverzální (kolem podélné osy segmentu). Z tohoto důvodu nelze značky na segment umístit tak, aby ležely v jedné přímce. Rotaci segmentu je možné charakterizovat pomocí rotace trojúhelníku, vytvořeného pomocí tří značek umístěných na daný segment.
Vyhodnocení záznamu
Vyhodnocení záznamu spočívá v určení obrazových (rovinných) souřadnic bodů. K tomu je nutné jejich označení na záznamu pohybu.
Manuální odečet souřadnic
V tomto případě označuje polohu středu vybraných značek vyhodnocovatel podle svého subjektivního uvážení. Tento postup, který je jediným možným způsobem při analýze pohybu, kdy nelze na sledovanou osobu připevnit značky, umožňují všechny softwary určené pro zpracování záznamu. Přesnost vyhodnocení je významně ovlivněna zkušeností osoby, provádějící vyhodnocení, nevýhodou je také velká časová náročnost.
Modifikací tohoto postupu, která je založena na využití matematického aparátu, je určení „oblasti“, ve které by se měla značka nacházet. Následné zpřesnění její polohy je otázkou příslušného software.
Automatický odečet souřadnic
Tyto postupy jsou založeny na odlišení vybraného bodu od pozadí, na kterém je bod umístěn. To znamená, že automatický odečet lze použít u značek s barevnými, světelnými nebo reflexními vlastnostmi. Jejich aplikace je však až na výjimky soustředěna do laboratorních podmínek. Mezi nejpoužívanější postupy patří např. vyhledávání tvarové symetrie vybrané oblasti, vytvoření korelační šablony vybrané obrazové oblasti apod. Rovněž odečet aktivních značek probíhá automaticky.
Kalibrace
Kalibrace je nezbytná pro určení závislostí mezi reálnými velikostmi a velikostmi získanými ze záznamu. K tomu je nutné, aby součástí záznamu bylo také nasnímání známých bodů v prostoru (body, jejichž vzdálenost je přesně definována). Ty slouží pro stanovení měřítka (převodního vztahu) mezi skutečnou a obrazovou soustavou souřadnic.
Synchronizace záznamů
Pro získání prostorových souřadnic bodu je nutné znát minimálně dvě dvojice rovinných souřadnic tohoto bodu ve stejném okamžiku. Proto je nutné provést synchronizaci záznamů z různých kamer, tzn. vytvořit dvojice odpovídajících si snímků na těchto záznamech.
Transformace souřadnic
Při transformaci souřadnic dochází k převodu rovinných obrazových souřadnic získaných ze dvou odpovídajících si poloh daného bodu na různých záznamech do reálných prostorových souřadnic bodu. Nejpoužívanějším postupem, který slouží pro transformaci souřadnic, je tzv. přímá lineární transformace (Direct linear transformation – DLT, Abdel-Aziz & Karara (1971)). Abychom mohli řešit soustavu rovnic pro transformaci souřadnic, musíme mít k dispozici odpovídající množinu bodů na kalibračním rámu, jejichž souřadnice známe. Minimální počet bodů, který je nezbytný pro řešení DLT rovnic s různým počtem parametrů, je uveden v tabulce 1.
Tabulka 1. Počet kontrolních bodů v závislosti na množství parametrů v DLT rovnicích
|
Počet parametrů
|
Minimální počet kontrolních bodů
|
|
11
|
6
|
|
12
|
6
|
|
14
|
7
|
|
16
|
8
|
Úprava vyhodnocených dat
I při dodržení všech pravidel v procesu záznamu pohybu a jeho vyhodnocení, jsou získaná data zatížena určitou nepřesností (chybou). K zmenšení nebo odstranění těchto chyb z vyhodnocených (hrubých) dat se používá jejich vyhlazení - smoothing.
Tento postup je založen na určité „plynulosti“ pohybových aktivit člověka a jeho segmentů a využívá matematické postupy (polynomická regrese, splajny) pro úpravu hodnot, které se nacházejí mimo tuto „plynulou“ křivku. Zatímco při použití polynomů jsou vyhodnocená data upravována jako celek, je při použití splajnů křivka aproximována po částech.
Další možností, jak upravit zpracovávaná data, je odstranění komponent signálu, které jsou způsobeny rušivými vlivy. To lze provést pomocí digitální filtrace signálu s využitím různých typů filtrů, v závislosti na typu řešené úlohy. Pro převod neperiodického signálu z časové do frekvenční oblasti se používá Fourierova transformace.
Technické parametry
Základní parametry kamery
Základními parametry, které jsou důležité pro určení vhodnosti použití kamery, jsou mj. hodnoty expoziční závěrky, zobrazovací schopnost kamery (rozlišení) a formát záznamu.
Rychlost závěrky ovlivňuje kvalitu záznamu, její nastavení souvisí s rychlostí prováděného pohybu. Základní hodnoty pro vybrané druhy pohybu jsou uvedeny v tabulce 2.
Tabulka 2. Rychlost závěrky pro zachycení ostrého obrazu při různých pohybových aktivitách
|
Pohybová aktivita
|
Expoziční doba
|
Pohybová aktivita
|
Expoziční doba
|
|
chůze
|
1/50
|
sprint
|
1/200 - 1/500
|
|
dřep
|
1/50
|
baseball
|
1/500 - 1/1000
|
|
košíková
|
1/100
|
střelba ve fotbale
|
1/500 - 1/1000
|
|
výskok
|
1/100
|
tenis
|
1/500 - 1/1000
|
|
běh
|
1/100 - 1/200
|
golf
|
1/1000 a kratší
|
U pohybu prováděných velkou rychlostí je, kromě rychlosti závěrky, důležitá také snímkovací norma, která udává počet snímků (frame) za časovou jednotku. Filmová snímkovací norma, při které nestačí lidské oko vnímat jednotlivé obrázky jdoucí za sebou odděleně, je 24 snímků za sekundu. Pro záznam pomocí videokamer byla tato časová rozlišitelnost stanovena na 25 Hz (PAL), resp. 30 Hz (NTSC). Zvýšení časové rozlišitelnosti na dvojnásobek umožňuje prokládané řádkování, kdy jsou přenášeny nejprve liché řádky a po nich sudé řádky obrazového rastru.
Pro záznam pohybu prováděného vysokou rychlostí existují speciální vysokorychlostní kamery, jejichž frekvence snímání se pohybuje od sta až po několik tisíc snímků za sekundu.
Pro kvalitu záznamu je dále důležitá jeho rozlišitelnost – tedy nejmenší krok, který můžeme měřit nebo odlišit na objektu měření nebo na přístroji, kterým měření provádíme. Plocha původního obrazu je pomocí řádků (vertikální rozlišitelnost) a sloupců (horizontální rozlišitelnost) rozdělena na množinu menších ploch – pixelů. S přechodem na digitální záznam obrazu lze parametry související s rozlišitelností považovat za dostatečné.
Typy výstupů získané zpracováním videozáznamu
Výstupy získané analýzou videozáznamu se liší v závislosti na požadavcích, kladených na rychlost předání informace a na její komplexnost.
-
Kinogram pohybu sestavený z vybraných poloh sledované pohybové činnosti
-
Kinogram pohybu (stick figure) získaný analýzou videozáznamu
-
Kinogram pohybu vybraného segmentu nebo bodu na lidském těle
-
Vybraná klíčová poloha nebo kinogram pohybu doplněný o číselné údaje
-
Grafické vyjádření nebo porovnání závislostí vybraných parametrů
-
Kombinace výstupů uvedených v bodech 1) až 5)